mein kleines virtuelles TAUCHCOMPUTER MUSEUM:
Tauchcomputer Steinzeit
vor meiner Zeit ...
- vor meiner Zeit gab es auch schon Tauch-"Computer"
- Bem.: diese Dinger habe ich noch nicht betaucht und sind auch nicht in meinem Museum zu finden
- aber ich wollte einfach diese netten Bilder teilen ...
- diese Infos habe ich von Karl E. Huggins, Catalina Hyperbaric Research; Ron Nishi, damals DCIEM, als auch
- direkt aus den NEDU Reports, den Berichten der United States Navy Experimental Diving Unit
- Quellen: siehe ganz unten
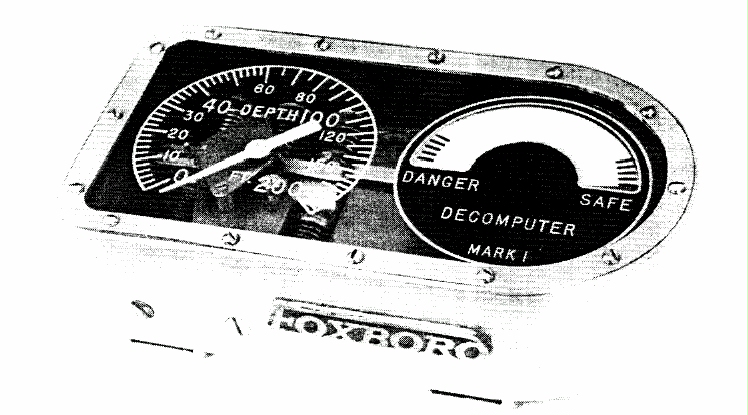
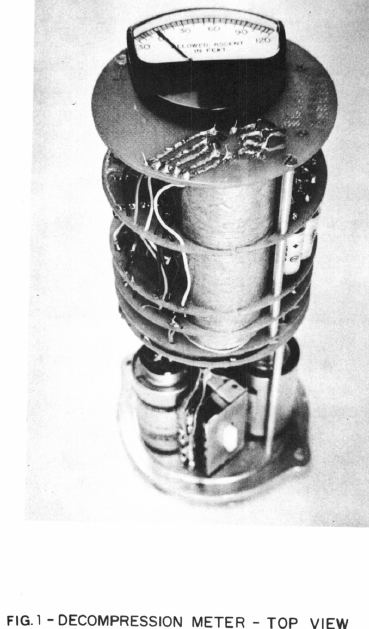
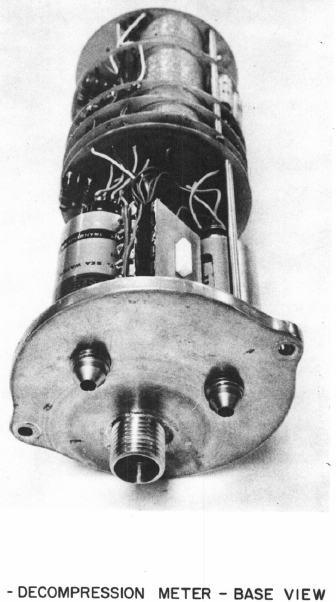
- dieses Teil heißt "Decomputer Mark I"
- ein pneumatisches Teil mit 2 Kompartimenten (t1/2: 40 und 75 Min.) der Fa. FOXBORO
- die erlaubte Übersättigung für beide Kompartimente betrug 1,75 : 1
- er wurde im Jahre 1955 entwickelt und an die NEDU zum testen gegeben
- da die Deko-Zeiten stark von denen der alten USN Tabelle abwichen, kam er nie zum Einsatz ...
- dies ist wohl weltweit der allererste elektronische Tauchcomputer
- er stammt aus dem Jahre 1963 und wurde von TRACOR, eine Tochtergesellschaft der Union Carbide Corp.,
- gemeinsam mit dem NEDU, entwickelt
- das Display zeigt die sichere Aufstiegstiefe in feet an
- es wurde ein 10-teiliges RC Netzwerk zur Simulation einer einfachen Diffusionsgleichung benutzt
- wegen der starken Temperaturabhängigkeit kam es über das Teststadium beim NEDU nicht hinaus
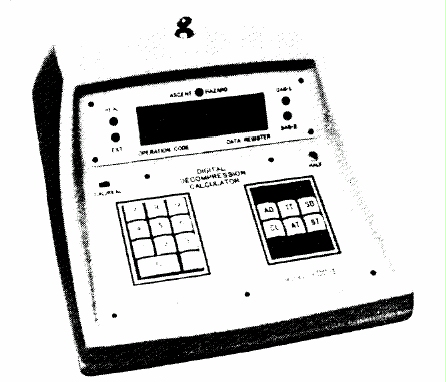
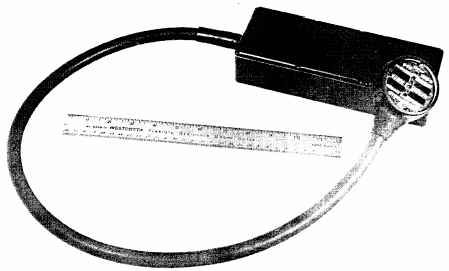
- dieses Teil ist ein von der DCIEM entwickelter Tischrechner
- namens: XDC-1 aus dem Jahre 1970
- er wurde mit einer "pneumo hose" (an einem Ende offener Luftdruckschlauch) betrieben
- dieses Pneumofathometer wurde am Taucher befestigt
- so konnte on-line die Tiefe gemessen werden
- mit der Tauchzeit wurde mit dem einprogrammierten Kidd-Stubbs Modell
- (serielles 4 Kompartiment Modell) die Deko-Prognosen berechnet
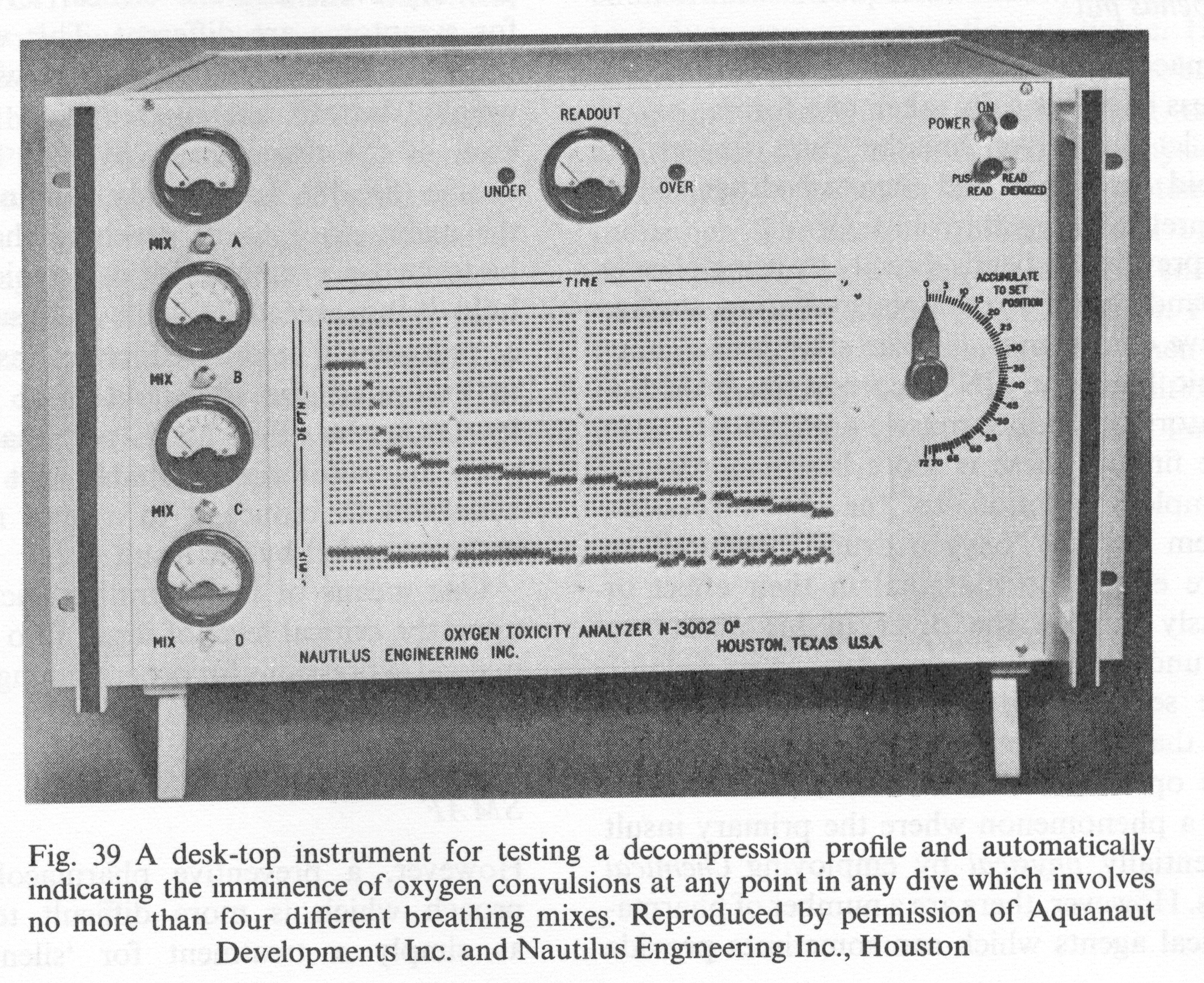
- dieses Teil fand ich in meinem Lieblings-Deko Buch [102] Decompression Sickness von Hills, B.A. auf S. 133:
- bis zu 4 Mischgase können pro Tauchprofil verwendet werden
- die Tiefen werden in 10 feet Abständen, die Zeiten in 1, 2, 5 oder 10 min. Abständen
- über kleine Stifte in einem Steuerbrett codiert
- es stammt von Anfang 1970 her und konnte neben dem
- Dekompressionsprofil gleich auch noch die Sauerstoff-Toxizität analysieren!
- das hächste hier ist das Nachfolgemodell des XDC-1, es ist der:
- XDC-2. Dieser hier ist heute noch (2012) in Gebrauch im: Hyperbaric Chamber of the
Sacre Coeur Hospital in Montreal!

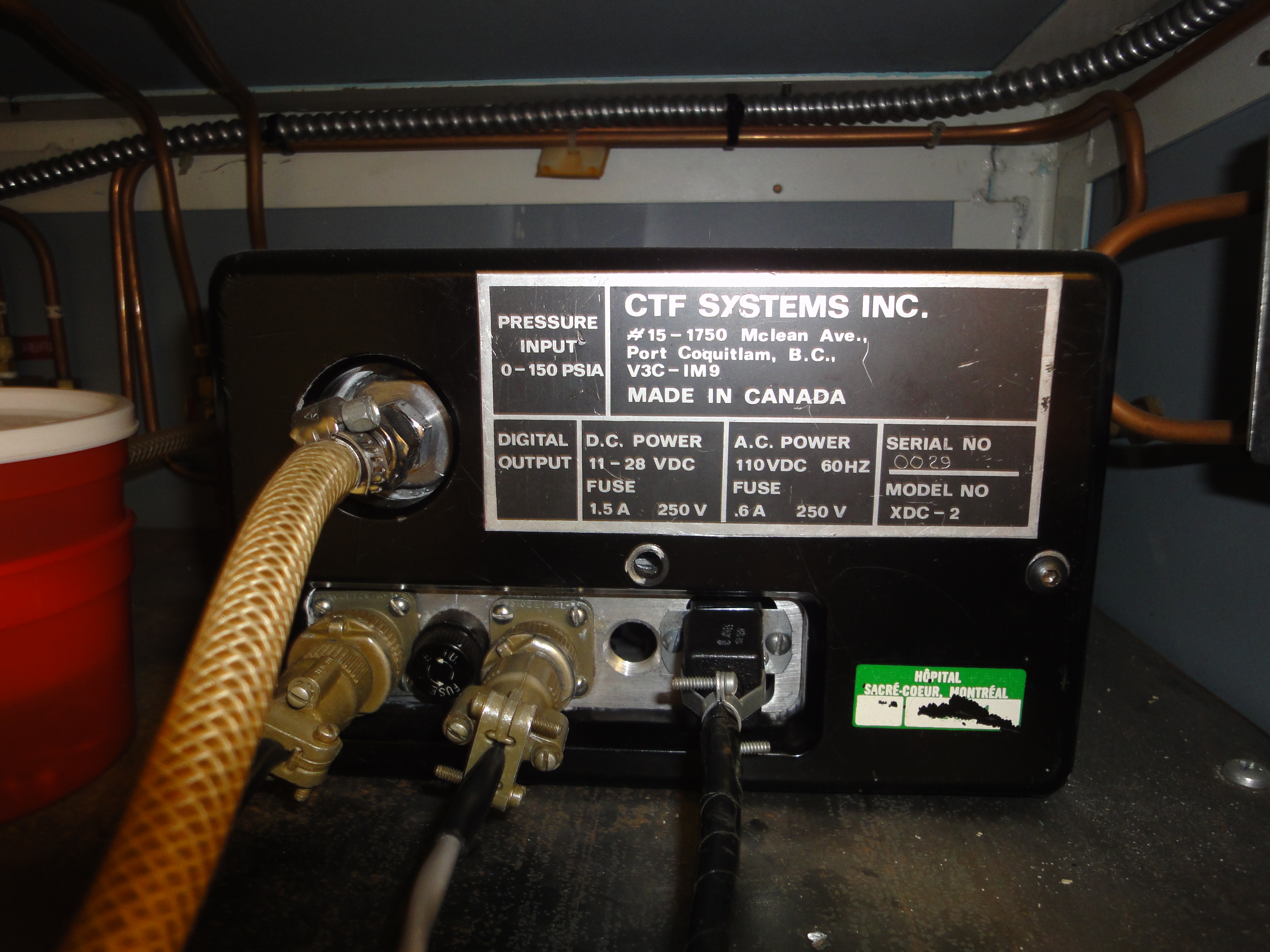
- Die Bildchen habe ich von:
- Marc Essertaize, Chief Operator
- man sieht das Front-Display
- und die Rückansicht mit den beiden Stromanschlüssen
- sowie den Luft-Schlauch and den Drucksensor (Pressure Input, 0 - 150 PSIA), geht also bis ca. 10.3 Bar
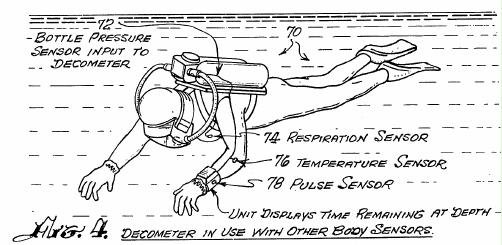
- Dies Bildchen hier ist aus einem US Patent des Jahres 1975!
- es ist von: Kirk E. Jennings, Kaneohe, Hawaii, US Patent No. 4005282,
- mit einem zukunftsweisenden Design:
- bereits 1979 ! war die Cyberdiver Serie auf dem amerikanischen / kanadischen Markt präsent:
- dieser hier ist der Cyberdiver bzw. der XDC-3, der direkte Vorläufer davon
- es handelt sich um die weltweit ersten echten Tauchcomputer, d.h.
- diese rechnen mit Microprozessoren in Echtzeit ein vollständiges
Dekompressionsmodell unter Wasser
- ca. 4 h Betrieb mit vier (!) 9 V Blocks, bereits einem HP Schlauchanschluß
- d.h.: der Flaschendruck wurde angezeigt sowie der Dekompressionsstatus gemäss den canadischen Modellen
- über 700 Stück wurde bis Anfang der 80'iger verkauft!
- ebenfalls 1979 gab es bereits den XDC-4, zugelassen für Mischgase bis 600 feet!
- Es war ein ausgefeiltes Mehr-Prozessor System das mit mehreren Deko-Modellen rechnen konnte: leider hatte es sich nicht am Markt durchgesetzt.
- alle diese Maschinen wurden gemeinsam vom DCIEM und CTF Systems, Inc. entwickelt und produziert
- bereits seit Sommer 1977 (laut FACEPLATE) hatte die USN einen kleinen Tauchcomputer
- dieser hier wurde UDC = Underwater Decompression Computer genannt:
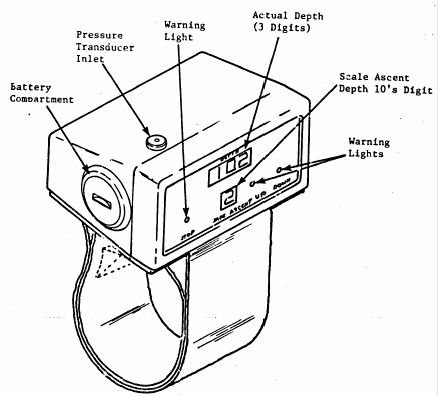
- 1983 und 1984 wurde er verstärkt eingesetzt um die neuen Dekompressions-Modelle zu testen,
- unter anderem das VVAL18, ein E-L Modell (exponentielle Gasaufnahme, lineare Gasabgabe)
- welches in den Kreislaufgeräten Mark 15 und 16 (UBA Mk 15 / 16) benutzt wurde
- Quellen für diese Informationen:
- Green, N. H., Woodward, B. The Evolution of Divers' Decompression Computers (1995), Society of Underwater Technology, Vol. 19, No. 1, p 9 - 23
- The Dynamcis of Decompression, Workbook, FIRST EDITION, KARL E. HUGGINS, THE UNIVERSITY OF MICHIGAN,
ANN ARBOR, MICHIGAN, 1992
- Proceedings of the AAUS Dive Computer Workshop, September 1988, USCSG-TR-01-89
- Microprocessor Applications to Multi-Level Air Decompression Problems, Karl E. Huggins, 1987, Michu-SG-87-201
- NEDU Report 1-63, R.D. Workman: Evaluation of a Decompression Computer developed for Divers
- NEDU Report 11-80, NAVY EXPERIMENTAL DIVING UNIT, REPORT NO. 11-80,
TESTING OF DECOMPRESSION ALGORITHMS FOR USE IN THE U. S. NAVY UNDERWATER DECOMPRESSION COMPUTER, PHASE I
Edward D. Thalmann, CDR, MC, USN
- NAVY EXPERIMENTAL DIVING UNIT, REPORT NO. 1-84,
PHASE I1 TESTING OF DECOMPRESSION ALGORITHMS
FOR USE IN THE U. S. NAVY
UNDERWATER DECOMPRESSION COMPUTER
Edward D. Thalmann, CDR, MC, USN, JANUARY 1984
- NEDU Report 10-86, TEST AND EVALUATION OF 2 PROTOTYPE MODEL UNDERWATER DECOMPRESSION MONITORS
- Developing the NEW US Navy Tables
(Kopie aus: aquaCorps Journal N8, S. 55 - 60)
zurück: zum Inhalt
zurück zur: Homepage